
wiringPi库使用
wiringPi库指令
查看wiringPi库版本
gpio -v
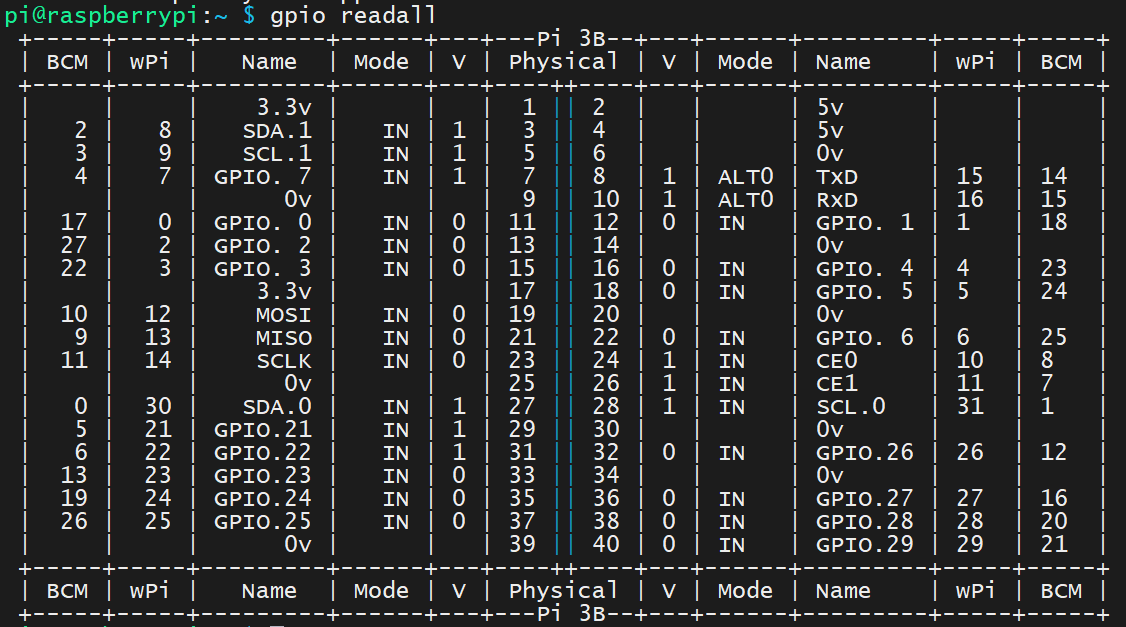
查看树莓派所以引脚状态
gpio readall
对wiringPi库进行交叉编译(暂时不可行)
通常我们先要交叉编译wiringPi库,编译出的库适合树莓派,这时候再进行交叉编译可执行程序,并链接库(通过-I -L来指定)。
否则会因为链接的库的格式不对,是宿主机的平台,出现以下错误,要把树莓派的wringPI库在ubuntu中交叉编译后进行库链接。
arm-linux-gnueabihf-gcc demo2.c -I /home/CLC/lessonPI/WiringPi/wiringPi -lwiringPi
/home/CLC/lessonPI/tools-master/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin/../lib/gcc/arm-linux-gnueabihf/4.8.3/../../../../arm-linux-gnueabihf/bin/ld: cannot find -lwiringPi
collect2: error: ld returned 1 exit status
由于在网络上搜集到的wiringPi.rar库安装包默认使用gcc编译安装,只适用于x86平台,不适用于arm平台,且此库中不含config等可更改编译选项的配置文件,所以这个库无法使用。
使用方法:将wiringPi.rar库压缩包解压缩后拷贝到ubuntu中,阅读README文件说明,运行build脚本安装
使用wiringPi库进行交叉编译
1、直接将树莓派中的wiringPi动态库libwiringPi.so.2.50拷贝到ubuntu中

2、在ubuntu中新建软连接指向wiringPi动态库
ln -s libwiringPi.so.2.50 libwiringPi.so
3、在ubuntu中交叉编译程序,交叉编译的同时指定wiringPi动态库
arm-linux-gnueabihf-gcc xxx.c -I /home/hq/raspberry/wiringPi -L. -lwiringPi -o xxx
-Ixxx的意思是除了默认的头文件搜索路径(比如/usr/include等)外,同时还在路径xxx下搜索需要被引用的头文件。
gcc -I. -I/usr/xxx的意思是,同时还要在.目录(即执行gcc的当前目录) 以及/usr/xxx目录下搜索头文件。
-Lxxx指定编译的时候,搜索库的路径。比如你自己的库,可以用它制定目录,不然编译器将只在标准库的目录找。这个xxx就是目录的名称。

wiringPi库例程汇总
例程 - 1 - 串口
serial.c serial2.c
#include <wiringSerial.h>
#include <stdio.h>
#include <wiringPi.h>
int main()
{
int fd;
int cmd;
//树莓派初始化
wiringPiSetup();
//Linux中一切皆文件,串口也是文件
fd = serialOpen("/dev/ttyAMA0",9600);
while(1)
{
while(serialDataAvail(fd) != -1)
{
cmd = serialGetchar(fd);
printf("get data =%c\n",cmd);
}
//在树莓派中,换行一般是/r/n配合使用
serialPuts(fd,"YANG HAO QING COOL!\r\n");
delayMicroseconds(1000000); //1s
}
serialClose(fd);
return 0;
}
#include <wiringSerial.h>
#include <stdio.h>
#include <wiringPi.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
void serialSetup()
{
if(-1 == wiringPiSetup())
{
printf("openSerial error\n");
exit(-1);
}
}
int main()
{
char buf[128] = {'\0'};
int serialDataCount = 0;
serialSetup();
int fd;
if((fd = serialOpen("/dev/ttyAMA0",9600)) == -1)
{ printf("serial open failed\n");
exit(-1);
}
while(1)
{
serialDataCount = read(fd, buf, sizeof(buf));
if(serialDataCount == 0)
{
printf("nodatas\n");
}
else
{
printf("getDatas:%s\n",buf);
memset(buf, '\0', sizeof(buf));
serialDataCount = 0;
}
}
return 0;
}
例程 - 2 - 继电器
relay1.c
#include <wiringPi.h>
#include <stdio.h>
#define SWITCHER 7
int main()
{
int cmd = 0;
if(wiringPiSetup() == -1){
printf("硬件初始化失败\n");
return -1;
}
pinMode(SWITCHER,OUTPUT);
digitalWrite(SWITCHER,HIGH);
while(1)
{
printf("请输入0/1: 0-断开开关 1-导通开关\n");
scanf("%d",&cmd);
getchar();
if(cmd == 1)
{
digitalWrite(SWITCHER,LOW);
}
else if(cmd == 0)
{
digitalWrite(SWITCHER,HIGH);
}
else
{
printf("输入错误\n");
}
}
}
例程 - 3 - 超声波传感器
ultrasonic.c
#include <wiringPi.h>
#include <stdio.h>
#include <sys/time.h>
#define Trig 4
#define Echo 5
void ultraInit(void)
{
pinMode(Echo, INPUT); //设置端口为输入
pinMode(Trig, OUTPUT); //设置端口为输出
}
float disMeasure(void)
{
struct timeval tv1; //timeval是time.h中的预定义结构体 其中包含两个一个是秒,一个是微秒
/*
* struct timeval
* {
* time_t tv_sec; //Seconds.
* suseconds_t tv_usec; //Microseconds.
* };
* */
struct timeval tv2;
long start, stop;
float dis;
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10); //发出超声波脉冲
digitalWrite(Trig, LOW);
while(!(digitalRead(Echo) == 1));
gettimeofday(&tv1, NULL); //获取当前时间 开始接收到返回信号的时候
while(!(digitalRead(Echo) == 0));
gettimeofday(&tv2, NULL); //获取当前时间 最后接收到返回信号的时候
/*
* int gettimeofday(struct timeval *tv, struct timezone *tz);
* The functions gettimeofday() and settimeofday() can get and set the time as well as a timezone.
* The use of the timezone structure is obsolete; the tz argument should normally be specified as NULL.
* */
start = tv1.tv_sec * 1000000 + tv1.tv_usec; //微秒级的时间
stop = tv2.tv_sec * 1000000 + tv2.tv_usec;
dis = (float)(stop - start) / 1000000 * 34000 / 2; //计算时间差求出距离
return dis;
}
int main(void)
{
float dis;
if(wiringPiSetup() == -1){ //如果初始化失败,就输出错误信息 程序初始化时务必进行
printf("setup wiringPi failed !");
return -1;
}
ultraInit();
while(1){
dis = disMeasure();
printf("distance = %0.2f cm\n",dis);
delay(1000);
}
return 0;
}
例程 - 4 - 控制4路继电器
relay_4route.c 4路继电器
#include <wiringPi.h>
#include <stdio.h>
#include <string.h>
#define SWI1 29
#define SWI2 28
#define SWI3 27
#define SWI4 26
int main()
{
char cmd[12] = {'\0'};
if(wiringPiSetup() == -1){
printf("硬件初始化失败\n");
return -1;
}
pinMode(SWI1,OUTPUT);
pinMode(SWI2,OUTPUT);
pinMode(SWI3,OUTPUT);
pinMode(SWI4,OUTPUT);
digitalWrite(SWI1,HIGH);
digitalWrite(SWI2,HIGH);
digitalWrite(SWI3,HIGH);
digitalWrite(SWI4,HIGH);
while(1)
{
printf("请输入1/2/3/4: off-断开开关 on-导通开关\n");
memset(cmd,'\0',sizeof(cmd)); //初始化整个字符数组
// scanf("%s",cmd);
gets(cmd);
if(strcmp(cmd,"1 on") == 0)
{
digitalWrite(SWI1,LOW);
}
else if(strcmp(cmd,"1 off") == 0)
{
digitalWrite(SWI1,HIGH);
}
if(strcmp(cmd,"2 on") == 0)
{
digitalWrite(SWI2,LOW);
}
else if(strcmp(cmd,"2 off") == 0)
{
digitalWrite(SWI2,HIGH);
}
if(strcmp(cmd,"3 on") == 0)
{
digitalWrite(SWI3,LOW);
}
else if(strcmp(cmd,"3 off") == 0)
{
digitalWrite(SWI3,HIGH);
}
if(strcmp(cmd,"4 on") == 0)
{
digitalWrite(SWI4,LOW);
}
else if(strcmp(cmd,"4 off") == 0)
{
digitalWrite(SWI4,HIGH);
}
if(strcmp(cmd,"all on") == 0)
{
digitalWrite(SWI1,LOW);
digitalWrite(SWI2,LOW);
digitalWrite(SWI3,LOW);
digitalWrite(SWI4,LOW);
}
else if(strcmp(cmd,"all off") == 0)
{
digitalWrite(SWI1,HIGH);
digitalWrite(SWI2,HIGH);
digitalWrite(SWI3,HIGH);
digitalWrite(SWI4,HIGH);
}
}
}
例程 - 5 - 语言识别
语音识别
/*=======================================
功能说明:语音识别
=======================================*/
#include <wiringSerial.h>
#include <stdio.h>
#include <wiringPi.h>
#include <unistd.h>
#include <string.h>
int main()
{
int fd;
char cmd[128] = {'\0'};
int nread;
//树莓派初始化
wiringPiSetup();
//Linux中一切皆文件,串口也是文件
fd = serialOpen("/dev/ttyAMA0",9600);
while(1)
{
nread = read(fd, cmd, sizeof(cmd));
if(strlen(cmd) == 0)
{
printf("overtime!\r\n");
continue;
}
//比较字符串1中是否含有字符串2,返回出现的位置
if(strstr(cmd,"open") != NULL)
printf("open light\n");
if(strstr(cmd,"close") != NULL)
printf("close light\n");
printf("get Data: %dbyte,content: %s\r\n",nread,cmd);
memset(cmd,'\0',sizeof(cmd)/sizeof(char));
}
serialClose(fd);
return 0;
}
树莓派wiringPi库详解
https://www.cnblogs.com/lulipro/p/5992172.html
wiringPi是一个很棒的树莓派IO控制库,使用C语言开发,提供了丰富的接口:GPIO控制,中断,多线程,等等。java 的pi4j项目也是基于wiringPi的,我最近也在看源代码,到时候整理好了会放出来的。
下面开始wiringPi之旅吧!
安装
进入 wiringPi的github (https://git.drogon.net/?p=wiringPi;a=summary) 下载安装包。点击页面的第一个链接的右边的snapshot,下载安装压缩包。
然后进入安装包所在的目录执行以下命令:
>tar xfz wiringPi-98bcb20.tar.gz //98bcb20为版本标号,可能不同
>cd wiringPi-98bcb20
>./build
验证wiringPi的是否安装成功,输入gpio -v,会在终端中输出相关wiringPi的信息。否则安装失败。
编译和运行
假如你写了一个LEDtest.c 的项目,则如下。
编译:
g++ -Wall -o LEDtest LEDtest.cpp -lwiringPi //使用C++编程 , -Wall 是为了使能所有警告,以便发现程序中的问题
gcc -Wall -o LEDtest LEDtest.c -lwiringPi //使用C语言编程
运行:
sudo ./LEDtest
查看引脚编号表格
使用如下控制台下命令
> gpio readall
也可以查看下面的图。
注意:查看时,将树莓派的USB接口面对自己,这样看才是正确的。

wiringPi库API大全
在使用wiringPi库时,你需要包含头文件 #include
硬件初始化函数
使用wiringPi时,你必须在执行任何操作前初始化树莓派,否则程序不能正常工作。
可以调用下表函数之一进行初始化,它们都会返回一个int , 返回 -1 表示初始化失败。
| int wiringPiSetup (void) | 返回:执行状态,-1表示失败 | 当使用这个函数初始化树莓派引脚时,程序使用的是wiringPi 引脚编号表。引脚的编号为 0~16需要root权限 |
|---|---|---|
| int wiringPiSetupGpio (void) | 返回执行状态,-1表示失败 | 当使用这个函数初始化树莓派引脚时,程序中使用的是BCM GPIO 引脚编号表。需要root权限 |
| wiringPiSetupPhys(void) | 不常用,不做介绍 | / |
| wiringPiSetupSys (void) ; | 不常用,不做介绍 | / |
通用GPIO控制函数
| void pinMode (int pin, int mode) | pin:配置的引脚mode:指定引脚的IO模式可取的值:INPUT、OUTPUT、PWM_OUTPUT,GPIO_CLOCK | 作用:配置引脚的IO模式 注意: 只有wiringPi 引脚编号下的1脚(BCM下的18脚) 支持PWM输出只有wiringPi编号下的7(BCM下的4号)支持GPIO_CLOCK输出 |
|---|---|---|
| void digitalWrite (int pin, int value) | pin:控制的引脚value:引脚输出的电平值。 可取的值:HIGH,LOW分别代表高低电平 | 让对一个已近配置为输出模式的 引脚 输出指定的电平信号 |
| int digitalRead (int pin) | pin:读取的引脚返回:引脚上的电平,可以是LOW HIGH 之一 | 读取一个引脚的电平值 LOW HIGH ,返回 |
| void analogWrite(int pin, int value) | pin:引脚value:输出的模拟量 | 模拟量输出树莓派的引脚本身是不支持AD转换的,也就是不能使用模拟量的API,需要增加另外的模块 |
| int analogRead (int pin) | pin:引脚返回:引脚上读取的模拟量 | 模拟量输入树莓派的引脚本身是不支持AD转换的,也就是不能使用模拟量的API,需要增加另外的模块 |
| void pwmWrite (int pin, int value) | pin:引脚value:写入到PWM寄存器的值,范围在0~1024之间。 | 输出一个值到PWM寄存器,控制PWM输出。 pin只能是wiringPi 引脚编号下的1脚(BCM下的18脚) |
| void pullUpDnControl (int pin, int pud) | pin:引脚pud:拉电阻模式可取的值:PUD_OFF 不启用任何拉电阻。关闭拉电阻。 PUD_DOWN 启用下拉电阻,引脚电平拉到GND PUD_UP 启用上拉电阻,引脚电平拉到3.3v | 对一个设置IO模式为 INPUT 的输入引脚设置拉电阻模式。与Arduino不同的是,树莓派支持的拉电阻模式更丰富。树莓派内部的拉电阻达50K欧姆 |
LED闪烁程序
#include<iostream>
#include<cstdlib>
#include<wiringPi.h>
const int LEDpin = 1;
int main()
{
if(-1==wiringPiSetup())
{
cerr<<"setup error\n";
exit(-1);
}
pinMode(LEDpin,OUTPUT);
for(size_t i=0;i<10;++i)
{
digitalWrite(LEDpin,HIGH);
delay(600);
digitalWrite(LEDpin,LOW);
delay(600);
}
cout<<"------------bye-------------"<<endl;
return 0;
}
PWM输出控制LED呼吸灯的例子
#include<iostream>
#include<wiringPi.h>
#include<cstdlib>
using namespace std;
const int PWMpin = 1; //只有wiringPi编号下的1脚(BCM标号下的18脚)支持
void setup();
int main()
{
setup();
int val = 0;
int step = 2;
while(true)
{
if(val>1024)
{
step = -step;
val = 1024;
}
else if(val<0)
{
step = -step;
val = 0;
}
pwmWrite(PWMpin,val);
val+=step;
delay(10);
}
return 0;
}
void setup()
{
if(-1==wiringPiSetup())
{
cerr<<"setup error\n";
exit(-1);
}
pinMode(PWMpin,PWM_OUTPUT);
}
时间控制函数
| unsigned int millis (void) | 这个函数返回 一个 从你的程序执行 wiringPiSetup 初始化函数(或者wiringPiSetupGpio ) 到 当前时间 经过的 毫秒数。 返回类型是unsigned int,最大可记录 大约49天的毫秒时长。 |
|---|---|
| unsigned int micros (void) | 这个函数返回 一个 从你的程序执行 wiringPiSetup 初始化函数(或者wiringPiSetupGpio ) 到 当前时间 经过的 微秒数。 返回类型是unsigned int,最大可记录 大约71分钟的时长。 |
| void delay (unsigned int howLong) | 将当前执行流暂停 指定的毫秒数。因为Linux本身是多线程的,所以实际暂停时间可能会长一些。参数是unsigned int 类型,最大延时时间可达49天 |
| void delayMicroseconds (unsigned int howLong) | 将执行流暂停 指定的微秒数(1000微秒 = 1毫秒 = 0.001秒)。 因为Linux本身是多线程的,所以实际暂停时间可能会长一些。参数是unsigned int 类型,最大延时时间可达71分钟 |
中断
wiringPi提供了一个中断处理注册函数,它只是一个注册函数,并不处理中断。他无需root权限。
| int wiringPiISR (int pin, int edgeType, void (*function)(void)) | 返回值:返回负数则代表注册失败pin:接受中断信号的引脚edgeType:触发的方式。 INT_EDGE_FALLING:下降沿触发 INT_EDGE_RISING:上升沿触发 INT_EDGE_BOTH :上下降都会触发 INT_EDGE_SETUP:编程时用不到。 function:中断处理函数的指针,它是一个无返回值,无参数的函数。 | 注册的函数会在中断发生时执行和51单片机不同的是:这个注册的中断处理函数会和main函数并发执行(同时执行,谁也不耽误谁)当本次中断函数还未执行完毕,这个时候树莓派又触发了一个中断,那么这个后来的中断不会被丢弃,它仍然可以被执行。但是wiringPi最多可以跟踪并记录后来的仅仅1个中断,如果不止1个,则他们会被忽略,得不到执行。 |
|---|---|---|
通过1脚检测 因为按键按下引发的 下降沿,触发中断,反转11控制的LED
#include<iostream>
#include<wiringPi.h>
#include<cstdlib>
using namespace std;
void ButtonPressed(void);
void setup();
/********************************/
const int LEDPin = 11;
const int ButtonPin = 1;
/*******************************/
int main()
{
setup();
//注册中断处理函数
if(0>wiringPiISR(ButtonPin,INT_EDGE_FALLING,ButtonPressed))
{
cerr<<"interrupt function register failure"<<endl;
exit(-1);
}
while(1)
;
return 0;
}
void setup()
{
if(-1==wiringPiSetup())
{
cerr<<"wiringPi setup error"<<endl;
exit(-1);
}
pinMode(LEDPin,OUTPUT); //配置11脚为控制LED的输出模式
digitalWrite(LEDPin,LOW); //初始化为低电平
pinMode(ButtonPin,INPUT); //配置1脚为输入
pullUpDnControl(ButtonPin,PUD_UP); //将1脚上拉到3.3v
}
//中断处理函数:反转LED的电平
void ButtonPressed(void)
{
digitalWrite(LEDPin, (HIGH==digitalRead(LEDPin))?LOW:HIGH );
}
多线程
wiringPi提供了简单的Linux系统下的通用的 Posix threads线程库接口来支持并发。
| int piThreadCreate(name) | name:被包装的线程执行函数返回:状态码。返回0表示成功启动,反之失败。源代码: int piThreadCreate (void *(*fn)(void *)) { pthread_t myThread ; return pthread_create (&myThread, NULL, fn, NULL) ; } |
包装一个用PI_THEEAD定义的函数为一个线程,并启动这个线程。首先你需要通过以下方式创建一个特特殊的函数,这个函数中的代码就是在新的线程中将执行的代码。,myTread是你自己线程的名字,可自定义。 PI_THREAD (myThread) { //在这里面写上的代码会和主线程并发执行。 } 在wiringPi.h中,我发现这样一个宏定义:#define PI_THREAD(X) void *X (void *dummy) 那么,被预处理后我们写的线程函数会变成下面这个样子,请注意返回值,难怪我每次写都会警告,因为没有返回一个指针, 那么,以后注意返回NULL,或者 (void*)0 void *myThread (void *dummy) { //在这里面写上的代码会和主线程并发执行。 } //在这里面写上的代码会和主线程并发执行。 |
|---|---|---|
| piLock(int keyNum) | keyNum:0-3的值,每一个值代表一把锁 | 使能同步锁。wiringPi只提供了4把锁,也就是keyNum只能取0~3的值,官方认为有这4把锁就够了。keyNum:0,1,2,3 每一个数字就代表一把锁。源代码:void piLock (int keyNum) { pthread_mutex_lock (&piMutexes [keyNum]) ; } |
| piUnlock(int keyNum) | keyNum:0-3的值,每一个值代表一把锁 | 解锁,或者说让出锁。源代码:void piUnlock (int key) { pthread_mutex_unlock (&piMutexes [key]) ; } |
| int piHiPri (int priority) | priority:优先级指数,0~99返回值:0,成功 -1:,失败 | 设定线程的优先级,设定线程的优先级变高,不会使程序运行加快,但会使这个线程获得相当更多的时间片。priority是相对的。比如你的程序只用到了主线程,和另一个线程A,主线程设定优先级为1,A线程设定为2,那也代表A比main线程优先级高。 |
凡是涉及到多线程编程,就会涉及到线程安全的问题,多线程访问同一个数据,需要使用同步锁来保障数据操作正确性和符合预期。
当A线程锁上 锁S 后,其他共用这个锁的竞争线程,只能等到锁被释放,才能继续执行。
成功执行了piLock 函数的线程将拥有这把锁。其他线程想要拥有这把锁必须等到这个线程释放锁,也就是这个线程执行piUnlock后。
同时要扩展的知识是:volatile 这个C/C++中的关键字,它请求编译器不缓存这个变量的数据,而是每次都从内存中读取。特别是在多线程下共享放变量,必须使用volatile关键字声明才是保险的。
softPwm,软件实现的PWM
树莓派硬件上支持的PWM输出的引脚有限,为了突破这个限制,wiringPi提供了软件实现的PWM输出API。
需要包含头文件:#include
编译时需要添pthread库链接 -lpthread
| int softPwmCreate (int pin, int initialValue, int pwmRange) | pin:用来作为软件PWM输出的引脚initalValue:引脚输出的初始值pwmRange:PWM值的范围上限建议使用100.返回:0表示成功。 | 使用一个指定的pin引脚创建一个模拟的PWM输出引脚 |
|---|---|---|
| void softPwmWrite (int pin, int value) | pin:通过softPwmCreate创建的引脚value:PWM引脚输出的值 | 更新引脚输出的PWM值 |
串口通信
使用时需要包含头文件:#include
| int serialOpen (char *device, int baud) | device:串口的地址,在Linux中就是设备所在的目录。默认一般是”/dev/ttyAMA0”,我的是这样的。 baud:波特率返回:正常返回文件描述符,否则返回-1失败。 | 打开并初始串口 |
|---|---|---|
| void serialClose (int fd) | fd:文件描述符 | 关闭fd关联的串口 |
| void serialPutchar (int fd, unsigned char c) | fd:文件描述符c:要发送的数据 | 发送一个字节的数据到串口 |
| void serialPuts (int fd, char *s) | fd:文件描述符s:发送的字符串,字符串要以’\0’结尾 | 发送一个字符串到串口 |
| void serialPrintf (int fd, char *message, …) | fd:文件描述符message:格式化的字符串 | 像使用C语言中的printf一样发送数据到串口 |
| int serialDataAvail (int fd) | fd:文件描述符返回:串口缓存中已经接收的,可读取的字节数,-1代表错误 | 获取串口缓存中可用的字节数。 |
| int serialGetchar (int fd) | fd:文件描述符返回:读取到的字符 | 从串口读取一个字节数据返回。如果串口缓存中没有可用的数据,则会等待10秒,如果10后还有没,返回-1所以,在读取前,做好通过serialDataAvail判断下。 |
| void serialFlush (int fd) | fd:文件描述符 | 刷新,清空串口缓冲中的所有可用的数据。 |
| *size_t write (int fd,const void * buf,size_t count) | fd:文件描述符buf:需要发送的数据缓存数组count:发送buf中的前count个字节数据返回:实际写入的字符数,错误返回-1 | 这个是Linux下的标准IO库函数,需要包含头文件#include |
| *size_t read(int fd,void * buf ,size_t count); | fd:文件描述符buf:接受的数据缓存的数组count:接收的字节数.返回:实际读取的字符数。 | 这个是Linux下的标准IO库函数,需要包含头文件#include |
初次使用树莓派串口编程,需要配置。我开始搞了很久,以为是程序写错了 还一直在调试。。。(~ ̄— ̄)~
/* 修改 cmdline.txt文件 */
>cd /boot/
>sudo vim cmdline.txt
删除【】之间的部分
dwc_otg.lpm_enable=0 【console=ttyAMA0,115200】 kgdboc=ttyAMA0,115200 console=tty1 root=/dev/mmcblk0p2 rootfstype=ext4 elevator=deadline rootwait
/*修改 inittab文件 */
>cd /etc/
>sudo vim inittab
注释掉最后一行内容:,在前面加上 # 号
#T0:23:respawn:/sbin/getty -L ttyAMA0 115200 vt100
sudo reboot 重启
下面是双机通信的一个例子
C51代码,作为串口通信的接发送。serial库请看另一篇文章
#include<reg52.h>
#include"serial.h"
/**********function****************/
bit isOpenPressed(void);
bit isClosePressed(void);
void delay(unsigned int t);
/*********************************/
sbit closeButton = P2^0; //与关闭按键相连的引脚
sbit openButton = P2^1; //与打开按键相连的引脚
void main(void)
{
closeButton = 1; //拉高
openButton = 1; //拉高
EA =1; //打开总中断
serial_init(9600); //初始化51串口
while(1)
{
if(isClosePressed()) //如果关闭按钮按下
{
serial_write(0); //发送数据 0给树莓派
delay(10);
}
else if(isOpenPressed()) //如果打开按钮按下
{
serial_write(1); //发送数据 1给树莓派
delay(10);
}
}
}
bit isOpenPressed(void)
{
bit press =0;
if(0==openButton)
{
delay(5);
if(0==openButton)
{
while(!openButton)
;
press = 1;
}
}
return press;
}
bit isClosePressed(void)
{
bit press =0;
if(0==closeButton)
{
delay(5);
if(0==closeButton)
{
while(!closeButton)
;
press = 1;
}
}
return press;
}
void delay(unsigned int t)
{
unsigned int i ;
unsigned char j;
for(i = t;i>0;i--)
for(j=120;j>0;j--)
;
}
树莓派代码,作为串口通信的接收方
#include<iostream>
#include<cstdlib>
#include<wiringPi.h>
#include<wiringSerial.h>
using namespace std;
void setup();
const int LEDPin = 11;
int main()
{
setup();
int fd; //Linux 的思想是:将一切IO设备,都看做 文件,fd就是代表串口抽象出来的文件
if((fd = serialOpen("/dev/ttyAMA0",9600))==-1) //初始化串口,波特率9600
{
cerr<<"serial open error"<<endl;
exit(-1);
}
while(true)
{
if(serialDataAvail(fd) >= 1) //如果串口缓存中有数据
{
int data = serialGetchar(fd);
if(data==0) //接受到51发送的 数据 0
{
// close led
digitalWrite(LEDPin,LOW);
}
else if(data==1) //接受到51发送的 数据 1
{
//open led
digitalWrite(LEDPin,HIGH);
}
}
}
return 0;
}
void setup()
{
if(-1==wiringPiSetup())
{
cerr<<"set up error"<<endl;
exit(-1);
}
pinMode(LEDPin,OUTPUT);
digitalWrite(LEDPin,HIGH);
}
shift移位寄存器芯片API
需要包含头文件 #include
| void shiftOut (uint8_t dPin, uint8_t cPin, uint8_t order, uint8_t val) | dPin:移位芯片的串行数据入口引脚,比如74HC595的SER脚cPin:移位芯片的时钟引脚。如74HC595的11脚order: LSBFIRST 先发送数据的低位 MSBFIRST先发送数据的高位 val:要发送的8位数据 | 将val串化,通过芯片转化为并行输出如常见的74HC595 |
|---|---|---|
| uint8_t shiftIn (uint8_t dPin, uint8_t cPin, uint8_t order) | 同上。 | 将并行数据,通过芯片转化为串行输出。 |
用过595的都知道还有一个引脚:12脚,Rpin,用于把移位寄存器中的数据更新到存储寄存器中,然后wiringPi的API中没有使用这个引脚。我建议使用的时候自己加上。
#include<iostream>
#include<wiringPi.h>
#include <wiringShift.h>
#include<cstdlib>
using namespace std;
const int SERpin = 1; //serial data input
const int SCKpin = 2; //shift register clock
const int RCKpin = 3; // storage register clock
/************************/
void setup();
/*************************/
int main()
{
setup();
for(int i=0;i<8;++i)
{
digitalWrite(RCKpin,LOW);
shiftOut(SERpin,SCKpin,LSBFIRST,1<<i);
digitalWrite(RCKpin,HIGH);
delay(800);
}
return 0;
}
void setup()
{
if(-1==wiringPiSetup())
{
cerr<<"setup error\n";
exit(-1);
}
pinMode(SERpin,OUTPUT);
pinMode(RCKpin,OUTPUT);
pinMode(SCKpin,OUTPUT);
}
树莓派硬件平台特有的API
并没有列全,我只是列出了相对来说有用的,其他的,都基本不会用到。
| pwmSetMode (int mode) | mode:PWM运行模式 | 设置PWM的运行模式。pwm发生器可以运行在2种模式下,通过参数指定: PWM_MODE_BAL :树莓派默认的PWM模式 PWM_MODE_MS :传统的pwm模式, |
|---|---|---|
| pwmSetRange (unsigned int range) | range,范围的最大值0~range | 设置pwm发生器的数值范围,默认是1024 |
| pwmSetClock (int divisor) | This sets the divisor for the PWM clock. To understand more about the PWM system, you’ll need to read the Broadcom ARM peripherals manual. | |
| piBoardRev (void) | 返回:树莓派板子的版本编号1或者2 | / |