
树莓派交叉编译(推荐)
引入
为什么要交叉编译
-
因为目的平台上的资源贫乏,无法运行我们所需要编译器,平台上不允许或不能够安装我们所需要的编译器比如C51。
-
树莓派有时又是因为目的平台还没有建立,连操作系统都没有,根本谈不上运行什么编译器。操作系统也是代码,也要编译。
平台运行需要两样至少东西:bootloader(启动引导代码)以及操作系统核心
宿主机(host) :编辑和编译程序的平台,一般是基于X86的PC机,通常也被称为主机。
目标机(target):用户开发的系统,通常都是非X86平台。host编译得到的可执行代码在target上运行。
交叉编译需要用到什么工具
交叉编译器、交叉编译工具链
交叉编译工具链的安装
https://github.com/raspberrypi/
- 从共享文件夹拷贝到工作目录
cp /mnt/hgfs/share/tools-master.zip . - 解压
unzip tools-master.zip - ``cd /home/CLC/lessonPI/tools-master/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin`
pwd获得路径echo $PATH获得当前环境变量的值
临时有效,配置环境变量
PATH 环境变量
export PATH=/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/home/CLC/lessonPI/tools-master/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin
永久有效,配置环境变量
修改工作目录下的.bashrc 隐藏文件,配置命令终端的 vi /home/CLC/.bashrc
在文件最后一行加入:
export PATH=/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/home/CLC/lessonPI/tools-master/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin
source /home/CLC/.bashrc 加载配置文件,马上生效配置。
将安装路径添加到PATH中,添加到.bashrc的结尾即可
交叉编译使用举例
交叉编译:检查下交叉编译工具对不对
arm-linux-gnueabihf-gcc -v 4.8.3
arm-linux-gnueabihf-gcc xxx.c -o xxx
如何把编译生成的可执行文件下载到开发板
# 指令 文件名 开发板用户名@开发板地址:开发板的绝对路径
scp clientInPi pi@192.168.43.30:/home/pi
树莓派源码分析及源码配置讲解
Linux内核源代码目录树结构
arch:包含和硬件体系结构相关的代码,每种平台占一个相应的目录。和32位PC相关的代码存放在i386目录下,其中比较重要的包括kernel(内核核心部分)、mm(内存管理)、math-emu(浮点单元仿真)、lib(硬件相关工具函数)、boot(引导程序)、pci(PCI总线)和power(CPU相关状态)。
block:部分块设备驱动程序。
crypto:常用加密和散列算法(如AES、SHA等),还有一些压缩和CRC校验算法。
Documentation:关于内核各部分的通用解释和注释。
drivers:设备驱动程序,每个不同的驱动占用一个子目录。
fs:各种支持的文件系统,如ext、fat、ntfs等。
include:头文件。其中,和系统相关的头文件被放置在linux子目录下。
init:内核初始化代码(注意不是系统引导代码)。
ipc:进程间通信的代码。
kernel:内核的最核心部分,包括进程调度、定时器等,和平台相关的一部分代码放在arch/*/kernel目录下。
lib:库文件代码。
mm:内存管理代码,和平台相关的一部分代码放在arch/*/mm目录下。
net:网络相关代码,实现了各种常见的网络协议。
scripts:用于配置内核文件的脚本文件。
security:主要是一个SELinux的模块。
sound:常用音频设备的驱动程序等。
usr:实现了一个cpio。
在i386体系下,系统引导将从arch/i386/kernel/head.s开始执行,并进而转移到init/main.c中的main()函数初始化内核。
树莓派Linux源码配置
.config文件是linux内核配置文件,当执行#make uImage编译生成内核时,顶层的Makefile会读取.config文件的内容,根据这个配置文件来编译所定制的内核。
内核源码配置的三种方式
- 根据厂家提供的Linux内核源码,进行修改,
厂家.config->自己.config make menuconfig进行配置,通常是基于厂家的config来配置。- 完全自己开发
树莓派交叉编译 & 本地编译 - 详细(推荐)
一、概述
树莓派的github主页:https://github.com/raspberrypi,里面包含了linux源码、交叉编译工具链等内容。
对于我们要用到的有两个仓库:
https://github.com/raspberrypi/linux 内核源码
https://github.com/raspberrypi/tools 交叉编译工具链(仅在交叉编译时用到)
注: 1、树莓派里安装的系统镜像版本要和kernel代码对应。因为树莓派系统是在不断开发和升级的,如果你的树莓派使用的是某个时间的系统镜像,那么最好也使用当时的kernel代码。 2、关于内核编译方法,官网有很详细的介绍:https://www.raspberrypi.org/documentation/linux/kernel/building.md,这里算是翻译和补充。 3、以下编译过程在树莓派1和树莓派3B上测试ok。
二、ubuntu里交叉编译
1、获取交叉编译工具和源码(开发资料中已下载)
源码:git clone git@github.com:raspberrypi/linux
交叉编译工具:git clone git@github.com:raspberrypi/tools
2、配置编译环境变量
2.1 手动配置环境变量(参考交叉编译工具链配置)
编译工具下载后,在64位ubuntu上编译我们需要的编译工具bin文件在:tools/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin 目录下,将此目录添加到环境变量PATH中,添加方法:
PATH=$PATH:/home/nicek/githubProjects/raspberrypi/tools/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin
如果是在32位系统中编译则要选择32位的交叉编译工具。
配置完成之后可以用编译工具命令查看到版本号:
arm-linux-gnueabihf-gcc -v
之后,所有的make命令都要指明一些环境变量:
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7
| ARCH=arm | 指明当前要编译arm,虽然树莓派是64位的,这里仍然选择arm,而不是arm64。 |
|---|---|
| CROSS_COMPILE | 指明交叉工具链名称。 |
| KERNEL | 指明kernel类型,树莓派1设置为kernel,树莓派2、3设置为kernel7。 |
每次make都需要指明这些环境变量,如:
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make menuconfig
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make -j4 zImage
2.2 自动配置环境变量(忽略)
上面这些环境变量每次命令都要写很麻烦,可以通过export一次设置:
export PATH=$PATH:/home/nicek/githubProjects/raspberrypi/tools/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7
之后在本终端里执行的所有命令都带有这些环境变量信息。
此 export 命令可以写成一个脚本,然后在编译前在终端里source一下这个脚本即可设置好所有的环境变量。就像android编译前也要先source一下envsetup.sh一样。
#!/bin/bash DIR="$( cd "$( dirname "${BASH_SOURCE[0]}" )" && pwd )" export PATH="$PATH:$DIR/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/bin/" export ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7
上述命令中的路径可能和你实际不同,注意修改。
export环境变量后,在本终端里的后续命令都可以不用再指明这些环境变量,如:
配置之前的命令:
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make menuconfig
配置之后的命令:
make menuconfig
3、配置config
linux源码中有很多工程: 树莓派1的工程是bcmrpi_defconfig 树莓派2、3的工程是bcm2709_defconfig
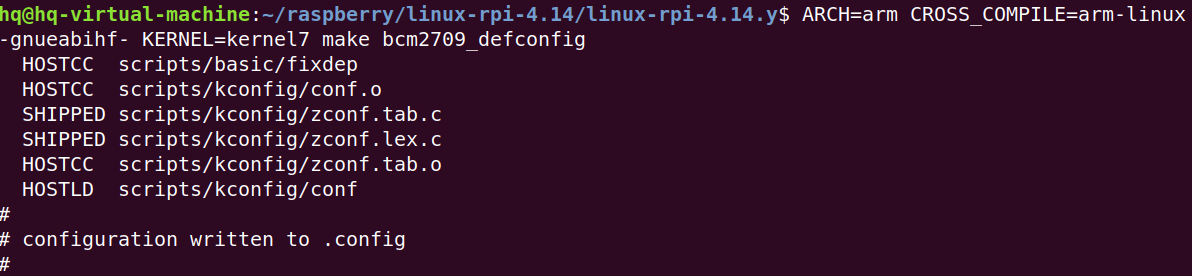
3.1 使用源码里自带的config
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make bcm2709_defconfig
ARCH=ARM指定ARM架构
CROSS_COMPILE=arm-linux-gnueabihf-指定编译器
KERNEL=kernel7树莓派
make bcm2709_defconfig主要核心指令
此命令功能是获取bcm2709_defconfig的配置到 .config里。 我们可以直接用工程里的配置,但这样的话可能会丢失原来使用的树莓派的配置,这里提供一个方法可以获取当前正在使用的树莓派的config。
3.2 获取当前树莓派的config(忽略)
已经开机的树莓派上会有这个节点:/proc/config.gz,从这个节点可以获取本树莓派的config。 如果没有这个节点的话则需要先加载模块:sudo modprobe configs
把 config.gz 内容复制到要编译的电脑上:
scp pi@[ip]:/proc/config.gz .
解压,保存为.confg文件。
zcat config.gz > .config
注:必须在linux环境下解压,在mac下会乱码。
把此config文件复制到linux源码的根目录。
4、编译
安装必要的库:
sudo apt-get install bc
sudo apt-get install libncurses5-dev libncursesw5-dev
sudo apt-get install zlib1g:i386
sudo apt-get install libc6-i386 lib32stdc++6 lib32gcc1 lib32ncurses5
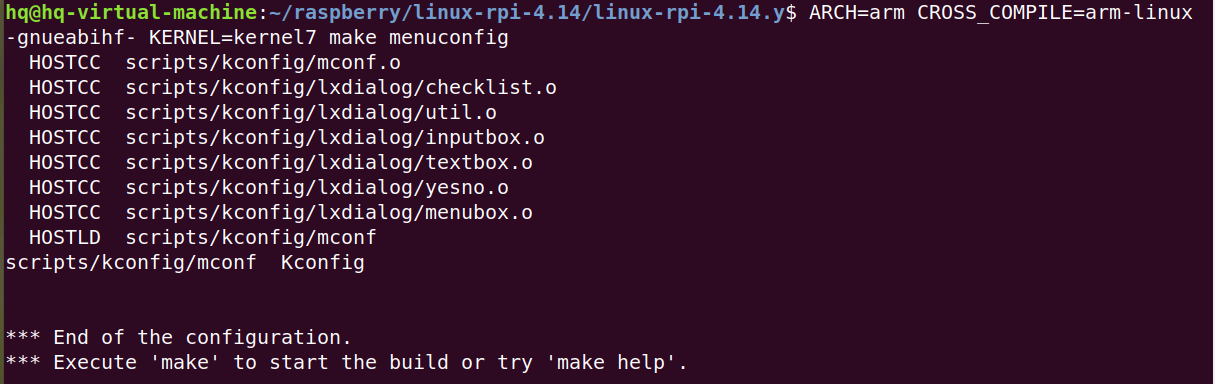
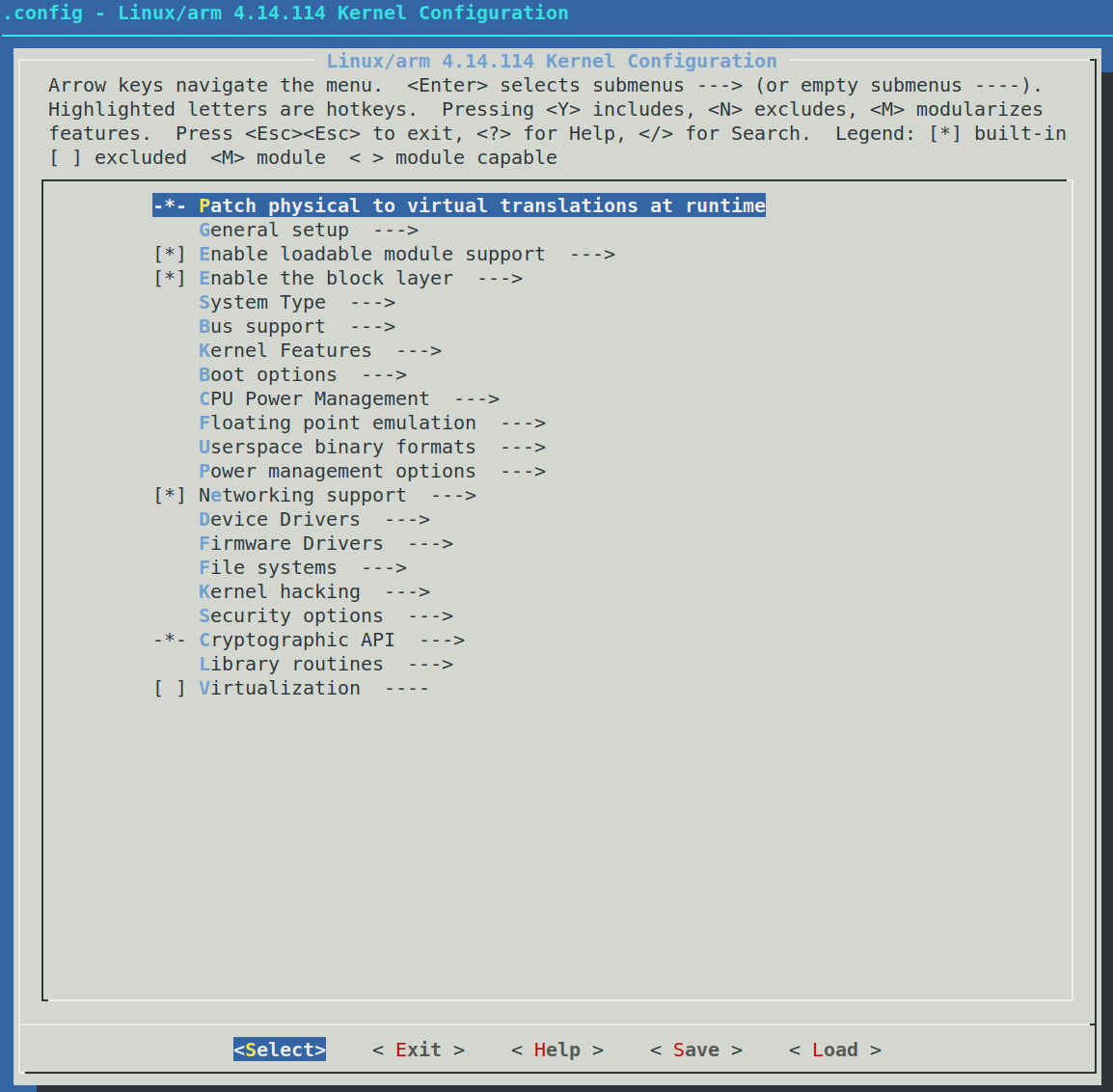
4.1 执行menuconfig
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make menuconfig
如果没什么改的就不用执行这一步。
4.2 编译
普通编译(初学推荐使用这个)
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make -j4 zImage modules dtbs
以n进程编译。不指明几进程的话则默认以单进程编译。
zImage生成内核镜像
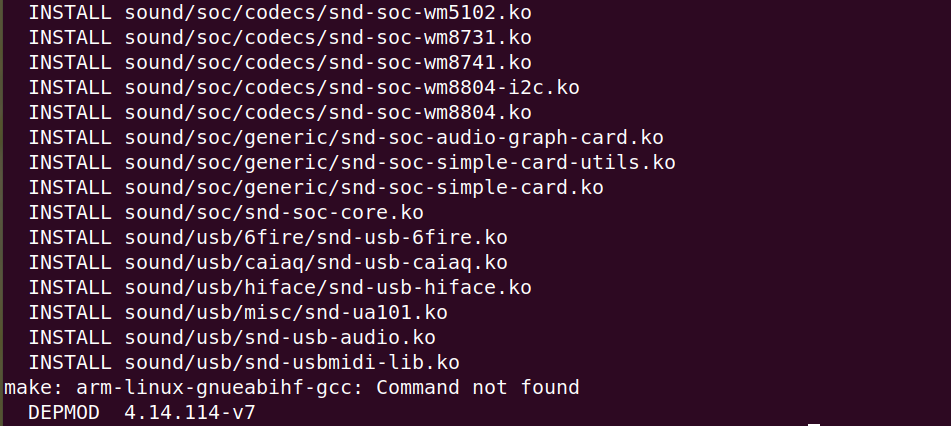
modules要生成驱动模块
dtbs生成配置文件
附带错误处理的编译指令(忽略)
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make -j4 zImage modules dtbs 2>&1 | tee build.log
4.3 打包zImage文件
文件位置
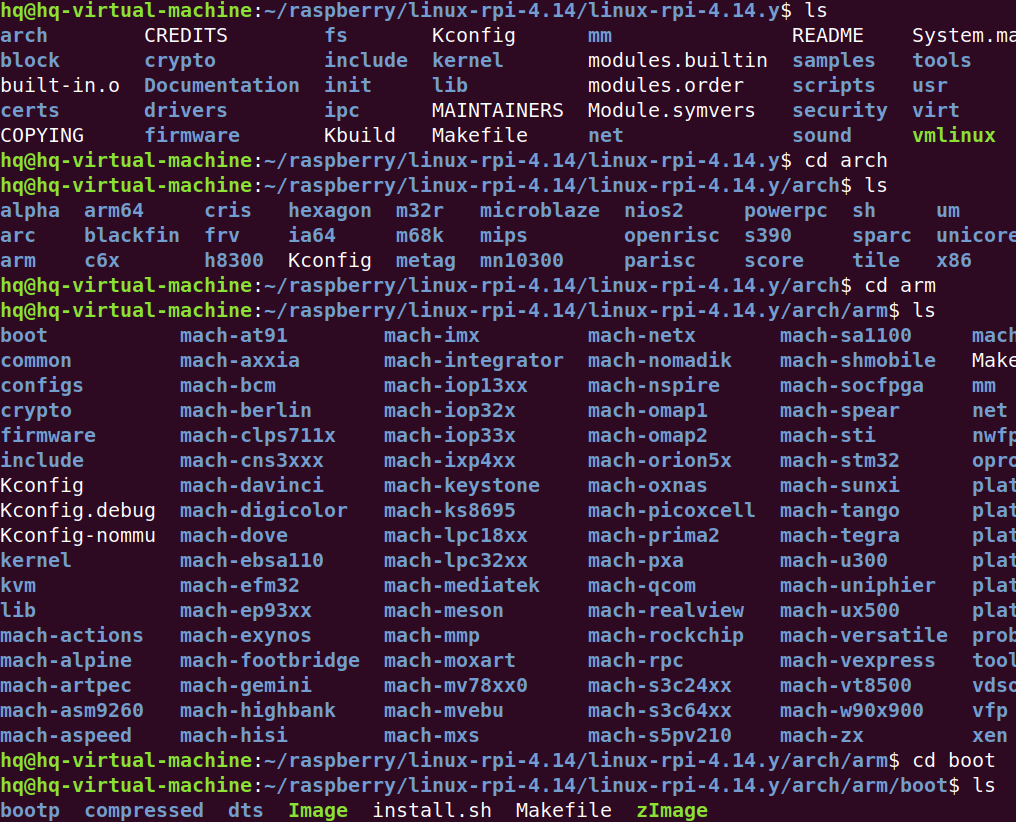
直接用linux源码包里的工具:
./scripts/mkknlimg arch/arm/boot/zImage ./kernel_new.img
在本目录生成一个kernel_new.img文件,这个文件就是要放到sd卡中的文件。

注:网上很多地方说的用 tools/mkimage/imagetool-uncompressd.py 的方法不行!!
5、挂载树莓派sd卡,并安装编译出的DIRECTLY 到sd卡
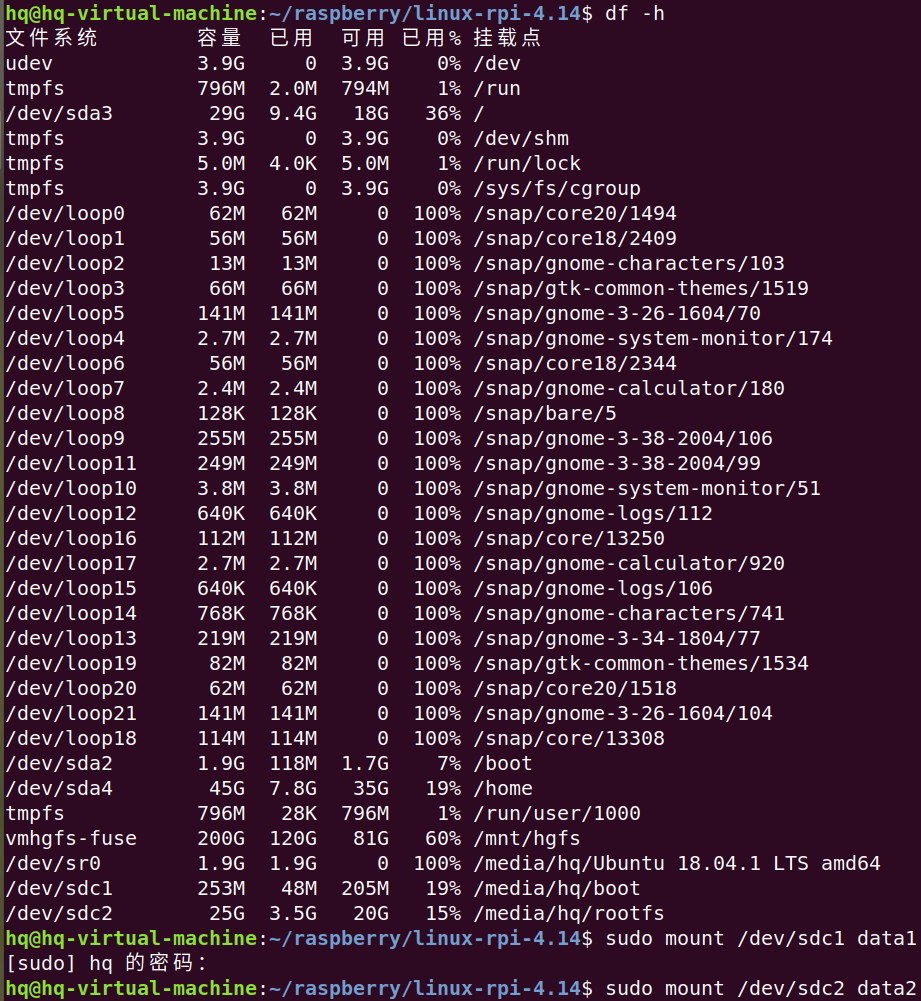
把树莓派的sd卡插入ubuntu系统电脑,树莓派的sd卡有两个分区:
- 一个fat分区,是boot相关的内容,kernel的img文件就放在这个分区里;
- 一个是ext4分区,也就是系统的根目录分区。
我们生成的文件涉及到这两个分区的内容,一般插入ubuntu后会自动挂载,fat分区可以不用root权限操作,ext4分区需要root权限操作。 两个分区具体挂载在什么地方可以自己决定,以下用[fat]表示boot挂载的路径,[ext4]表示ext4挂载的路径。
5.1 安装modules
数据拷贝
mkdir data1 data2
# 挂载U盘
# 一个fat分区,是boot相关内容,kernel的img
sudo mount /dev/sdb1 data1
# 一个是ext4分区,也就是系统的根目录分区
sudo mount /dev/sdb2 data2
将下面的ext4替换为data1或者data2 INSTALL_MOD_PATH=/home/hq/data2
sudo ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make INSTALL_MOD_PATH=[ext4] modules_install
# 比如
sudo ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make INSTALL_MOD_PATH=/home/hq/raspberry/linux-rpi-4.14/data2 modules_install
操作ext4分区,需要root权限。
5.2 更新 kernel.img 文件
方法一
安装更新kernel.img文件,注意镜像名字是kernel7.img
先备份
cd /home/hq/data1
cp kernel7.img kernel7OLD.img
再把编译新生成的拷贝到data1,起名kernel7.img
cp kernel_new.img /home/hq/data1/kernel7.img
方法二(推荐)
前面已经用 mkknlimg 工具打包了kernel_new.img文件了,把它复制到boot分区并配置使用即可:
cp kernel_new.img [fat]/
编辑 [fat]/config.txt 文件,在最后加入一行:
kernel=kernel_new.img
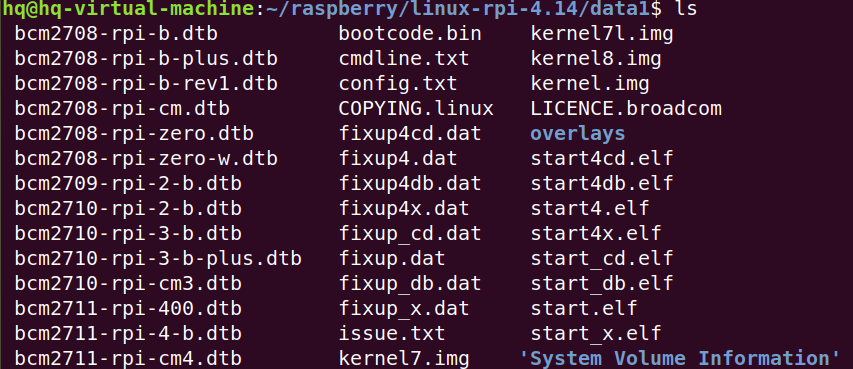
5.3 复制其他相关文件
[fat] 为 /home/hq/raspberry/linux-rpi-4.14/data1
cp arch/arm/boot/dts/*.dtb [fat]/
cp arch/arm/boot/dts/overlays/*.dtb* [fat]/overlays/
cp arch/arm/boot/dts/overlays/README [fat]/overlays/
cp arch/arm/boot/dts/*.dtb /home/hq/raspberry/linux-rpi-4.14/data1
cp arch/arm/boot/dts/overlays/*.dtb* /home/hq/raspberry/linux-rpi-4.14/data1/overlays/
cp arch/arm/boot/dts/overlays/README /home/hq/raspberry/linux-rpi-4.14/data1/overlays/

更新完成后插回树莓派即可开机,开机后可以用 uname -a 命令查看kernel信息已经改变。

三、树莓派本地编译(直接在树莓派上编译内核)
树莓派上本地编译和上面交叉编译原理基本相同,由于是本地编译,在编译工具和环境变量配置方面还简单一些。 树莓派上编一次内核花了将近2小时。
1、获取源码
git clone git@github.com:raspberrypi/linux
2、配置编译环境
在ubuntu里交叉编译时需要配置的环境变量有:
- PATH: 添加交叉工具链的目录
- ARCH: 配置成arm
- CROSS_COMPILE: 配置成ubuntu上使用的交叉工具链arm-linux-gnueabihf- KERNEL=kernel7
- KERNEL: 配置成kernel7
而在树莓派本地编译: 关于交叉工具链,本身的编译工具就可以编译给自己使用,所以不用配置; 只需要配置 KERNEL=kernel7 即可。
和上面相同,可以用 export KERNEL=kernel7,一次设置之后此终端里所有命令都带有此环境变量。 也可以更进一步写成脚本,不过这里这一行命令很简单,不写脚本也可以。
3、配置config
和上面一样, 树莓派1使用的是 bcmrpi_defconfig, 树莓派2、3使用的是 bcm2709_defconfig。 例:KERNEL=kernel7 make bcm2709_defconfig
如果要使用树莓派自带的config的话: sudo modprobe configs # 加载模块 zcat config.gz > .config # 获取配置
4、编译
安装必要的库:
sudo apt-get install bc
sudo apt-get install libncurses5-dev libncursesw5-dev
sudo apt-get install zlib1g
sudo apt-get install libc6
1、执行menuconfig KERNEL=kernel7 make menuconfig 没什么要改的话就不用执行这一步。
2、编译 KERNEL=kernel7 make -j4 zImage modules dtbs 2>&1 | tee build.log 以n进程编译。不指明几进程的话则默认以单进程编译。
3、打包zImage文件 直接用linux源码包里的工具: ./scripts/mkknlimg arch/arm/boot/zImage ./kernel_new.img 在本目录生成一个kernel_new.img文件,这个文件就是要放到sd卡中的文件。
5、更新系统
1、安装模块 sudo make modules_install
2、复制dtb文件 sudo cp arch/arm/boot/dts/*.dtb /boot/ sudo cp arch/arm/boot/dts/overlays/*.dtb* /boot/overlays/ sudo cp arch/arm/boot/dts/overlays/README /boot/overlays/
3、更新kernel.img文件 sudo cp arch/arm/boot/zImage /boot/$KERNEL.img
树莓派Linux内核编译 - 编程那些年
树莓派的Linux内核编译有两种方法: 一种是在树莓派上直接编译,另一种是利用交叉编译的方法。一般我们都推荐采用交叉编译的方式进行编译,这是因为通常交叉编译Pi内核的速度比Pi本身编译快得多(性能因素)。下面就讲下如下利用这两种方式来编译Pi内核。
第一种方法:Pi本地编译
前提条件
准备一张16G以上TF卡。
如果上述没有该条件,可以利用NFS挂载方式,将源码目录挂载到主机上,利用主机的空间来存储代码,但会影响到编译速度。 比如我将虚拟机的nfs目录挂载到Pi的/mnt目录下,并在该目录下存储代码,如下:
pi@raspberrypi:~ $ mount | grep mnt
192.168.1.133:/nfs/ on /mnt type nfs (rw,relatime,vers=3,rsize=524288,wsize=524288,namlen=255,hard,nolock,proto=tcp,port=2049,timeo=70,retrans=3,sec=sys,local_lock=all,addr=192.168.1.133)
pi@raspberrypi:~ $ ls /mnt/
linux
pi@raspberrypi:~ $
编译前准备
首先,配置好树莓派的网络(用推荐用有线网络,否则下载会非常慢)和树莓派的源(推荐使用阿里源,将“raspbian.raspberrypi.org”替换为“mirrors.aliyun.com/raspbian”字段),正常souces.list前后替换后差异内容大致如下:
安装git和树莓派内核编译所需的依赖库,如下所示:
$ sudo apt install git bc bison flex libssl-dev make
下载内核源码
利用git获取当前git仓库默认Pi的内核源码,如下所示:
$ git clone --depth=1 https://github.com/raspberrypi/linux
当然,你也可以选择下载自己所需的内核源码版本,如需要下载4.14.y,可利用branch参数下载,如下:
$ git clone --depth=1 https://github.com/raspberrypi/linux --branch rpi-4.14.y
配置内核
根据当前你使用的Raspberry Pi的实际型号,通过运行以下具体命令进行准备默认配置:
如果是Raspberry Pi 2, Pi 3, Pi 3+系列,默认配置如下:
pi@raspberrypi:/mnt $ cd linux
pi@raspberrypi:/mnt/linux $ KERNEL=kernel7
pi@raspberrypi:/mnt/linux $ make bcm2709_defconfig
Raspberry Pi 4的默认配置如下:
pi@raspberrypi:/mnt $ cd linux
pi@raspberrypi:/mnt/linux $ KERNEL=kernel7l
pi@raspberrypi:/mnt/linux $ make bcm2711_defconfig
Raspberry Pi 1、Pi Zero、Pi Zero W系列的默认采用配置如下:
pi@raspberrypi:/mnt $ cd linux
pi@raspberrypi:/mnt/linux $ KERNEL=kernel
pi@raspberrypi:/mnt/linux $ make bcmrpi_defconfig
如果需要额外对内核进行配置,则可以利用如下命令实现:
pi@raspberrypi:/mnt/linux $ make menuconfig
编译和安装
最后进行编译安装内核、驱动模块、设备树配置操作,这个过程会比较漫长,需要耐心等待,命令如下:
pi@raspberrypi:/mnt/linux $ make -j4 zImage modules dtbs
pi@raspberrypi:/mnt/linux $ sudo make modules_install
pi@raspberrypi:/mnt/linux $ sudo cp arch/arm/boot/dts/*.dtb /boot/
pi@raspberrypi:/mnt/linux $ sudo cp arch/arm/boot/dts/overlays/*.dtb* /boot/overlays/
pi@raspberrypi:/mnt/linux $ sudo cp arch/arm/boot/dts/overlays/README /boot/overlays/
pi@raspberrypi:/mnt/linux $ sudo cp arch/arm/boot/zImage /boot/$KERNEL.img
pi@raspberrypi:/mnt/linux $ sudo reboot -f
第二种方法:交叉编译内核
首先,需要准备一台Linux交叉编译主机,比如Ubuntu 18.04(可以安装实体机或者VMware或VirtualBox里)。
编译前准备 首先在交叉编译Linux主机上安装所需的依赖和交叉编译工具,如下:
sudo apt install git bc bison flex libssl-dev make libc6-dev libncurses5-dev
如果Pi安装的是32的内核,则安装32位的交叉编译工具链:
(注:通过在Pi里运行“file /sbin/busybox” 或其他可执行程序可查看当前内核是32位还是64位的。如果是32位的,会显示如下32-bit 字段,否则为64位的)
$ sudo apt install crossbuild-essential-armhf
否则,如果Pi使用的是64的内核,则安装64位的交叉编译工具链:
$ sudo apt install crossbuild-essential-arm64
获取源码
利用git获取当前git仓库默认Pi的内核源码,如下所示:
$ git clone --depth=1 https://github.com/raspberrypi/linux
当然,你也可以选择下载自己所需的内核源码版本,如需要下载4.14.y,可利用branch参数下载,如下:
$ git clone --depth=1 https://github.com/raspberrypi/linux --branch rpi-4.14.y
配置内核
针对32位系统:
如果是Pi 2, Pi 3, Pi 3+, 和3系列树莓派,运行如下命令:
linux@ubuntu:~$ cd linux
linux@ubuntu:~/linux$ KERNEL=kernel7
linux@ubuntu:~/linux$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- bcm2709_defconfig
如果是Raspberry Pi 4,运行如下命令:
linux@ubuntu:~$ cd linux
linux@ubuntu:~/linux$ KERNEL=kernel7l
linux@ubuntu:~/linux$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- bcm2711_defconfig
如果是Pi 1, Pi Zero, Pi Zero W,运行如下命令:
linux@ubuntu:~$ cd linux
linux@ubuntu:~/linux$ KERNEL=kernel
linux@ubuntu:~/linux$ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- bcmrpi_defconfig
针对64位系统:
如果是Pi 2, Pi 3, Pi 3+, 和3系列树莓派,运行如下命令:
linux@ubuntu:~$ cd linux
linux@ubuntu:~/linux$ KERNEL=kernel8
linux@ubuntu:~/linux$ make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- bcmrpi3_defconfig
如果是Raspberry Pi 4,运行如下命令:
linux@ubuntu:~$ cd linux
linux@ubuntu:~/linux$ KERNEL=kernel8
linux@ubuntu:~/linux$ make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- bcm2711_defconfig
编译内核
如果是32位内核,运行如下命令:
make -j4 ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- zImage modules dtbs
如果是64位内核,运行如下命令:
make -j4 ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- Image modules dtbs
内核安装到TF卡
将TF卡接到Linux交叉编译主机上(如果是VMwar虚拟机,则需要将”设置->硬件->USB控制机->USB兼容性(C)”调成“USB 1.1”)
运行lsblk命令查看识别到的TF卡设备节点,如下:*
linux@ubuntu:~/linux$ lsblk
NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT
sda 8:0 0 20G 0 disk
└─sda1 8:1 0 20G 0 part /
sdb 8:16 1 14.6G 0 disk
├─sdb1 8:17 1 256M 0 part /media/linux/boot
└─sdb2 8:18 1 3.3G 0 part /media/linux/rootfs
正常TF卡设备会自动挂载到/media/${当前用户目录}/下的boot和rootfs目录下,如果没有自动挂载,则根据识别到实际TF卡的设备节点,将设备挂载到主机上,如下:
sudo mkdir /media/linux/rootfs -p
sudo mkdir /media/linux/boot -p
sudo mount /dev/sdb1 /media/linux/boot
sudo mount /dev/sdb2 /media/linux/rootfs
然后将内核模块安装到SD中:
如果是32位内核,运行如下命令:
sudo env PATH=$PATH make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- INSTALL_MOD_PATH=/media/linux/rootfs modules_install
如果是64位内核,运行如下命令:
sudo env PATH=$PATH make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- INSTALL_MOD_PATH=/media/linux/rootfs modules_install
最后备份原理SD卡中的旧内核, 并将新内核和设备树配置文件到SD卡中:
如果是32位内核,运行如下命令:
sudo cp /media/linux/boot/$KERNEL.img /media/linux/boot/$KERNEL-backup.img
sudo cp arch/arm/boot/zImage /media/linux/boot/$KERNEL.img
sudo cp arch/arm/boot/dts/*.dtb /media/linux/boot
sudo cp arch/arm/boot/dts/overlays/*.dtb* /media/linux/boot/overlays/
sudo cp arch/arm/boot/dts/overlays/README /media/linux/boot/overlays/
sudo umount /media/linux/boot
sudo umount /media/linux/rootfs
如果是64位内核,运行如下命令:
sudo
cp /media/linux/boot/$KERNEL.img /media/linux/boot/$KERNEL-backup.img
sudo cp arch/arm64/boot/Image /media/linux/boot/$KERNEL.img
sudo cp arch/arm64/boot/dts/broadcom/*.dtb /media/linux/boot/
sudo cp arch/arm64/boot/dts/overlays/*.dtb* /media/linux/boot/overlays/
sudo cp arch/arm64/boot/dts/overlays/README /media/linux/boot/overlays/
sudo umount /media/linux/boot/
sudo umount /media/linux/rootfs
当然,你也可以不备份旧的内核,而是通过重命令编译出来的内核名称,如将编译出来的img改为kernel-new.img,然后修改config.txt的配置文件种的kernel字段,如下:
kernel=kernel-new.img
这么做的好处是保证原有的内核不被破坏,如果新的内核无法启动,只需要将config.txt的kernel字段改回来即可。
最后,将TF卡插回Pi上,然后启动Pi即可。